soft actuators testing|soft actuators pdf : agency This paper presents a novel soft actuator with stiffness variation using particulate jamming technology. We design a hybrid composite structure consisting of driving layer and . WEBCONCURSOS. COMLURB - Edital Nº. 01/2009. CONCURSO PÚBLICO PARA PREENCHIMENTO DE VAGAS E FORMAÇÃO DE CADASTRO RESERVA PARA O .
{plog:ftitle_list}
WEB1 de fev. de 2024 · Se procura conselhos antes de tomar a decisão de apostar na Betway, então está no lugar certo.Neste artigo, vai ficar a saber tudo sobre a Betway Portugal, incluindo prós e contras da casa, porque apostar na Betway, se a casa é de confiança e quais os principais bónus.. Saiba ainda como criar conta na Betway, de que forma .
In this Review article, however, we focus on the application of the soft actuators in soft robotics where the reported metrics include mode and speed of actuation (or locomotion), power, voltage, current (of the driving signal), lifting force, and weight among others.materials have shown potential in soft actuation applications as will be .
This paper presents a novel soft actuator with stiffness variation using particulate jamming technology. We design a hybrid composite structure consisting of driving layer and . However, current soft functional actuators meet limitations in real-life applications such as slow response time or low power, are difficult to control precisely, or require dangerous stimuli (e.g., high voltage) (4–7).For example, .
Soft actuator technology is extensively utilized in robotic manipulation applications. However, several existing designs of soft actuators suffer from drawbacks such as a complex casting process, a multi-air chamber .The field of soft actuators and robotics has garnered considerable attention in recent years, driven by their distinct properties to adapt to diverse environments and enable secure and engaging interactions with humans. While current literature highlights a significant body of work on various soft actuators, it is noteworthy that the concept of soft sleeve actuation remains . If the sample is a polymer sheet, the healing will typically be tested in a tensile test machine and the mechanical properties of the sample will be compared with those of the undamaged sample. 9–11 However, if the sample is a soft actuator, its actuation capabilities, such as its bending, displacement, and generated force, will be tested and .Actuators Some of the information contained in this web site includes intellectual property covered by both issued and pending patent applications. It is intended solely for research, educational and scholarly purposes by not-for-profit research organizations. If you have interest in .
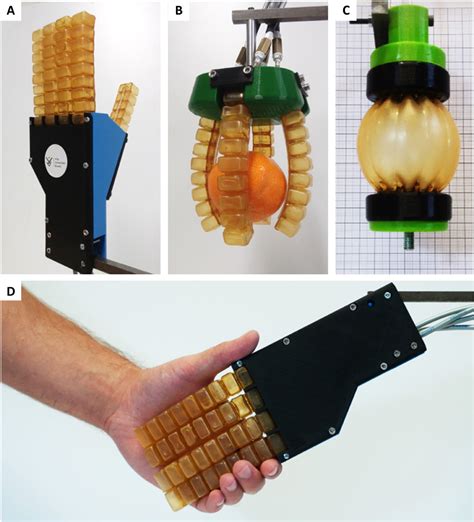
Soft actuators, which are encased in pliable, rubbery materials, can safely interact with biological tissues and possess unique mechanical properties that make them ideal building blocks for surgical robots, wearable devices, augmented reality gadgets and human-machine interfaces. . To test the actuator’s impact resistance, the researchers .
Soft actuators can absorb energy to enable safe and compliant physical interaction with the environment in a way that is similar to biological muscles, allowing for a bio-inspired approach to robotics and actuation. . For testing, pressure inputs within a range of 0–196 kPa (0–20 psi) with increments of 17 kPa (2.5 psi) were given via the .
a | Soft robotic systems can be actuated through changes in the fluid or air pressure ΔP.b | Dielectric elastomers are actuated by an electric field.c | Electrothermal actuation of a single twisted fibre.d | Forces can be transmitted by tendons.T C, cooling temperature; T H, heating temperature.. Electrically driven soft actuators. Electrically driven actuation is the second . Inspired by physically adaptive, agile, reconfigurable and multifunctional soft-bodied animals and human muscles, soft actuators have been developed for a variety of applications, including soft . Stress-stretch equations for curve fitting with uniaxial tensile testing data. . soft actuators with rod-like structures that can bend, twist, shear, and stretch [257] (Fig. 3 b). SoMo is a . Similar to biological muscles, the soft actuator is one of the most important parts in soft robots, and can be activated by fluid, thermal, electricity, magnet, light, humidity, and chemical reaction. . I. “Soft” exoskeletons for upper and lower body rehabilitation— Design, control and testing. Int. J. Humanoid Robot. 2007, 04, 549 .
Utilise testing methodologies to evaluate the efficacy of the actuator, and include the Finite Element Method (FEM) to enhance the design and fabrication of the soft actuator. This study examines the correlation between the degree of curvature and various design parameters of a pneumatic soft actuator that operates on air pressure and consists . This paper presents the design, modeling, and testing of a soft pneumatic glove with five segmented PneuNets bending actuators (SPBAs) made of elastomer, each actuator driving the corresponding .According to Marckmann and Verron, [] Shahzad et al., [] Rackl, [] and Meier et al., [] a unique experiment is not sufficient to characterize the behavior of elastomers, especially if the elastomer experiences multiaxial stress states, which is the particular case with the pressurization of soft actuators. Under the incompressibility assumption, all deformations are determined by two . The soft actuator fully extends to push the front module forward. The front module then deploys its anchors so that the front of the robot is fixed to the track, and the rear anchoring module is released. Lastly, the soft actuator .
Many of the existing pneumatic soft actuators have a fixed response after fabrication. This means that once they are fabricated, the actuators always bend, twist or stretch in the same way upon inflation. . The purpose of the project that is described here is to give a detailed description of the design, fabrication and testing of these soft .This documentation set contains files and instructions to support the design, fabrication, modeling, and testing of a specific PneuNets bending actuator. We also provide a case study of this actuator's use in an assistive glove for hand rehabilitation.While we focus on a particular example of a PneuNets actuator, the principles and guidelines presented here can be adapted to . Poly(vinylidene fluoride) (PVDF) and its copolymers are extensively used in smart structure sensors, actuators and transducers because of their good piezoelectric and pyroelectric properties [1–8].PVDF as a soft material has been used in space [].A PVDF dust detector was set on the Interplanetary Kite-craft Accelerated by Radiation Of the Sun (IKAROS) solar sail .
(a) Bending example of soft block actuator. Foam is sealed with Ecoflex 00-10 and the strain-limiting layer is paper and OOMOO 30; (b) M4601 Actuator test with 100g/450g/500g weight in accordance with actuation force measurement for M4601 sealing (c) Soft actuators have shown great advantages in compliance and morphology matched for manipulation of delicate objects and inspection in a confined space. . tensile testing, (B) load testing, and . The concept of soft robots has garnered significant attention in recent studies due to their unique capability to interact effectively with the surrounding environment. However, as the number of innovative soft pneumatic actuators (SPAs) continues to rise, integrating traditional sensors becomes challenging due to the complex and unrestricted movements exhibited by .
This study introduces a novel approach to soft robotic assistive devices using untethered, soft actuators with seamlessly integrated sensing, heating, and actuation properties through digital machine knitting and low-boiling liquid. The proposed soft actuator operates under a voltage of less than 12.5 V, generating a tip force of up to 50 mN. Testing on six healthy subjects showed that the SR-AFO device could change eversion stiffness from ≈20 to 70 Nm rad −1 at 30 kPa, while minimizing the change in dorsiflexion stiffness. The variable stiffness of the soft pneumatic actuators makes the AFO highly versatile and functional in multiple directions, as compared to conventional .
soft pneumatic actuators
soft material for soft actuators
Soft actuators have brought significant advancements to robotics, allowing robots to perform a diverse range of tasks across various domains. However, the increased use of soft actuators has resulted in negative environmental impacts, including material consumption, waste generation, and energy consumption. To address these challenges, research is increasingly .
The actuator achieves maximum bending angles of 90°, 48°, 90° and 180° in the Mobula simulation, jellyfish simulation, 2-DOF simulation and hand simulation soft robot, respectively. This advantage is particularly significant for 2-DOF actuators, which in previous reports could only achieve maximum bending angles of 1.5°–28°. In this review, we focus on the latest developments in perceptive soft actuators and the integrated sensing technologies, as shown in Fig. 2.In Section 2, the sensing technologies that have been and can be literally integrated into soft actuators are introduced according to their sensing mechanisms, which include resistive, capacitive, piezoelectric, triboelectric, and optical.
soft material for actuators
Relative to existing fluidic actuators (10, 15–19, 27–29), including soft fluidic actuators driven by separated ECF jet pumps or traditional rigid pumps, SEFAs that highly integrate pumps, tubes, liquid reservoirs, and actuators not only exhibit better portability but also show excellent response to electrical signals. Several detailed .
soft electromagnetic actuators
soft actuators pdf

WEBتطبيقات عد الكلمات في برامج الحاسوب لها فائدة كبيرة. على سبيل المثال، هل حاولت تحديد عدد كلمة معينة في مستند؟ يقدم موقع KelmaCount.com أداة على الإنترنت لعد الكلمات.
soft actuators testing|soft actuators pdf